Как эффективно разработать беспилотный автомобиль или БПЛА с применением технологии цифровых двойников

Требования – основа разработки любых изделий
Автомобили и самолеты – одни из сложнейших технических объектов, созданных человеком. Идея заставить их двигаться и выполнять требуемые операции самостоятельно не нова. В последнее десятилетие она получила дополнительный импульс: с развитием технологий машинного зрения, искусственных нейронных сетей в программном обеспечении беспилотной техники, появилась возможность сделать поистине революционный рывок. Переход от «классических» алгоритмов управления к нейросетевым подходам в комплексе с современными вычислительными мощностями, инфраструктурными возможностями и современными архитектурами беспилотной техники делают ее массовый выход в мир реальным.

Какими бы ни были цели разработки беспилотной техники, исследовательскими или коммерческими, прежде всего требуют ответа вопросы: «Для чего? Для кого?». Делать робота только для того, чтобы показать, что мы это умеем, — задача увлекательная, но это дорогостоящее увлечение должен кто-то оплачивать. У того, кто платит, должна быть понятная мотивация. Заказчик до разработки изделия должен знать, каким оно будет: выполняемые функции, технические характеристики, цена. Без четкой формулировки требований инвестировать «в туман» крайне рискованно.
Требования к беспилотной технике обычно формулируются в проекции на аналогичное «традиционное» изделие. Чтобы быть лучше, беспилотная техника должна безопаснее, лучше, дешевле, эффективнее выполнять аналогичные задачи. В разных видах беспилотной техники выполняются разные из этих условий, но выгода в любом случае должна быть очевидной.
Для автомобиля речь в первую очередь идет о безопасности, стоимости и удобстве использования. При этом, сравнивая, скажем, стоимости беспилотного и «традиционного» автомобиля, можно учитывать косвенные факторы. Сколько стоят два-три часа в день, проведенных за рулем в пробках? В беспилотном варианте в это время можно заняться какими-то своими делами.
В случае с авиационной техникой, где более половины происшествий вызваны ошибками экипажа (человеческий фактор), беспилотность призвана повысить безопасность полетов. Мультикоптеры — воздушные такси – в принципе бессмысленно делать пилотируемыми. Это должны быть легкие, компактные аппараты, в которых всё оптимизировано под перевозку пассажиров, в то время как и вес, и место, занимаемые пилотом, этому явно мешают. Авиационную технику, не предназначенную для перевозки пассажиров, в большинстве случаев также выгоднее делать беспилотной по экономическим причинам. БПЛА, как правило, имеет принципиально меньшую стоимость разработки, изготовления и эксплуатации.

Контроль процесса разработки
Между согласием разработчика на выполнение требований и передачей готового годного изделия заказчику лежит процесс разработки изделия. Каким он должен быть? Есть несколько стратегий.
Первая (самая манящая, но недальновидная): разработчик считает, что он умен и опытен. Поэтому сразу набело «начертит» конструкцию, «напишет» системы управления, сразу отдаст «в изготовление». То есть разработчик не предпринял никаких шагов по контролю требований в процессе разработки в надежде на то, что звезды сложатся удачно. Такой исход теоретически возможен, если разрабатываемое изделие является копией тех, что разработчик производил до этого. Если же оно несет в себе новые элементы, возможность такого благополучного исхода стремительно тает с ростом процента новизны в конструкции. Поскольку в процессе разработки требования не контролировались, на этап испытаний первого прототипа выйдет изделие с неизвестными характеристиками. Результаты его натурных испытаний, скорее всего, окажутся неприятным сюрпризом для разработчика.
Разработчик, как мы помним, считает себя умным и опытным. Дорабатывать изделие он будет тем же порочным способом: что-то поменяет в чертежах, системе управления, изготовит новый прототип и испытает его. Такая стратегия, основанная на итерациях проб и ошибок с натурными прототипами, – самый дорогой и неэффективный способ выполнения требований. Сколько прототипов потребуется, чтобы добиться требуемого результата? Где гарантия, что требования в конце концов удастся выполнить? Этот подход делает разработчика неконкурентоспособным.
Стратегия на самом деле должна подразумевать контроль требований в процессе разработки. В идеале этот процесс должен охватывать все этапы разработки – от анализа реализуемости проекта до сертификации изделия.
Цифровой двойник изделия
Как контролировать требования в процессе разработки изделия? Условно разделим их на те, которые можно проверить 3DCAD моделями или чертежами, и те, что нельзя. К первой группе относятся, например, габаритные размеры изделия, клиренс, колесная база автомобиля, а также компоновочные требования — агрегаты должны помещаться во внешние обводы изделия и не мешать пассажирам.
Вторая группа – функциональные требования к рабочим характеристикам изделия: топливная экономичность; дальность полета, езды на одной заправке или на одной зарядке аккумулятора; скорость; грузоподъемность, динамика движения или полета; управляемость. Рабочие характеристики – именно то, ради чего заказчику необходимо изделие.
Единственный способ контроля функциональных требований на этапах разработки – расчетные модели. В настоящее время разработчикам доступны инструменты компьютерного моделирования такого уровня, что можно говорить о полноценном цифровом двойнике разрабатываемого изделия, то есть о наборе расчетных моделей, с помощью которых можно виртуально, в компьютерной среде, воспроизвести все испытания, определяющие пригодность изделия, проверить все контролируемые характеристики, полный состав технических требований.
Виртуальная разработка объекта управления
Специфика разработки беспилотной техники заключается в том, что, помимо задачи разработки «традиционного» изделия, необходимо «научить» его выполнять задания самостоятельно, в автономном режиме. В пилотируемой конструкции объектом управляет человек. Но с ростом уровня беспилотности функции управления частично или полностью передаются компьютерной системе.
Объекты управления в беспилотной технике не становятся проще по сравнению с «традиционными» изделиями. Наоборот, к ним предъявляются новые требования: длительность работы в автономном режиме, способность приводов воспроизводить команды системы управления в ожидаемом частотном диапазоне и уровне усилий, моментов. Кроме того, во многих случаях, изделия, разрабатываемые как беспилотные, проще и целесообразнее делать электрическими или «более электрическими». Откуда возникают задачи разработки электромобилей, электрических БПЛА, мультикоптеров – аэротакси, электрических или гибридных пассажирских самолетов.
Ключевой элемент электрификации — аккумуляторы, имеющие свойство стареть и деградировать. Причем скорость их выхода из строя критически зависит от температурного режима эксплуатации и стратегии зарядки-использования. Литий-ионные аккумуляторы, возможно, самая дорогая часть конструкции. Никому не захочется менять их часто. Соответственно, необходимо оптимизировать логику и процедуры зарядки, а также обеспечить терморегулирование, особенно с учетом российских суровых зим.
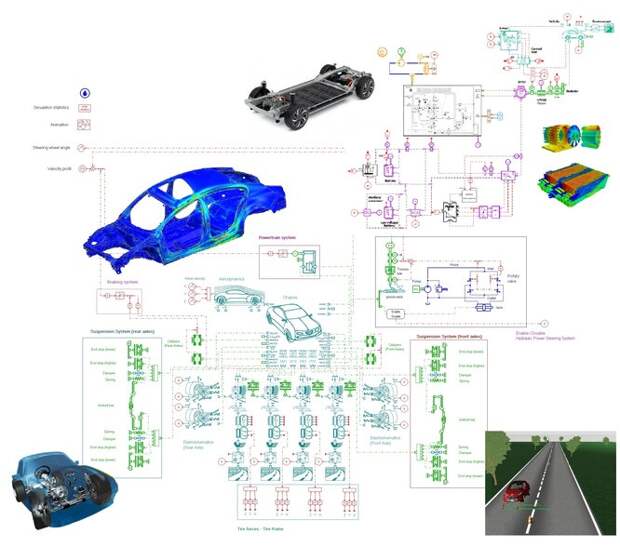
Инструменты виртуального моделирования, с помощью которых создается цифровой двойник, в том числе должны соответствовать таким новым вызовам. Примером здесь может служить платформа Simcenter, которая объединяет лидирующие решения для многодисциплинарного виртуального моделирования и натурных испытаний, обеспечивая применение технологии цифрового двойника изделия на всех этапах проектирования, включая сертификацию.
На ранних этапах разработки моделированием определяется архитектура разрабатываемого изделия – то, из каких систем и агрегатов должен состоять автомобиль или БПЛА, как эти системы должны взаимодействовать. Далее расчетно обосновывается оптимальный выбор характеристик входящих агрегатов и компонентов. Например, чтобы электроэнергии хватило всем бортовым потребителям на требуемое время поездки, полетное задание, но при этом чтобы изделие не оказалось переразмеренным. Когда появляются первые альтернативные прорисовки внешних обводов и компоновки изделия, цифровой двойник дополняется расчетными 3D-моделями анализа прочности, аэродинамики, вибраций, шума, работы механизмов.
В приложении к автомобилю в комплексе оптимизируются характеристики топливной экономичности, энергетического баланса, динамики движения, управляемости, комфорта, терморегулирования, пассивной безопасности, вибраций, внутреннего и внешнего проездного шума, долговечности. Для БПЛА дополнительно — специфические характеристики динамики полета, работы систем управления полетом, температурного и энергетического баланса борта, внешнего пролетного шума. Также оптимизируется работа исполнительных механизмов и устройств, например, погрузки или разгрузки в случае грузового автомобиля, оборудования слежения или отсоединения чего-либо в БПЛА.
Цифровой двойник позволяет виртуально выполнить полный комплекс необходимых испытаний изделия, стендовых, дорожных и летных, и до изготовления опытных образцов с уверенностью получить объект управления с требуемыми характеристиками. При этом принципиально сокращаются затраты на натурные испытания, доводку и сертификацию изделия.
Возможности цифровых двойников
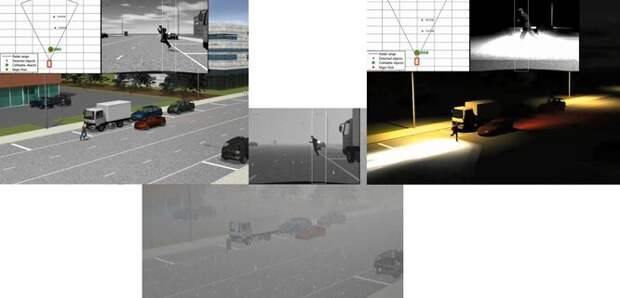
Глубокие искусственные нейронные сети – находка для разработчиков систем управления. Они сегментируют сцену, детектируют и распознают живые и неживые объекты, применяются в алгоритмах планирования пути и принятия решений. Предположим, первая задача решена: система управления определяет сцену, распознает объекты, определяет позиционирование нашего, например, автомобиля по отношению к ним.

Чтобы система управления «знала», что делать в той или иной ситуации, она должна быть «обучена». То есть в общем она должна «знать» последствия тех или иных своих управляющих команд в каждой из возможных ситуаций. Это доступно, если каждая из возможных ситуаций и все возможные реакции системы управления на нее были заранее опробованы. Тогда любая из ситуаций будет «знакома» системе управления, и она на нее оптимально отреагирует. При этом, если система управления окажется в незнакомой ситуации, не зная, что делать, максимально безопасной командой может быть, например, торможение.
По различным оценкам, система управления автомобиля 5-го уровня беспилотности должна «знать» более 10 миллионов различных дорожных ситуаций, включая аварийные. Но как обучить систему управления такому огромному числу ситуаций? Возвращаемся к нашим двум стратегиям. Первая: оснащаем автомобиль камерами, лидарами, другими сенсорами в той или иной их комбинации и ездим по улицам, «собирая» ситуации. Очевидно, что, если у нас такой инструментированный автомобиль сбора один, или даже сто, на сбор данных потребуются десятилетия.
Альтернативой становится цифровой двойник: он должен быть дополнен виртуальными моделями сенсоров машинного зрения, моделями сцен и участников движения; должен учитывать влияние всевозможных внешних погодных условий, возможную смену дня и ночи. Такой комплексный цифровой двойник беспилотного автомобиля также может быть построен с помощью инструментов платформы Simcenter. При этом все расчеты могут выполняться на компьютерах реального времени, что важно при отработке систем управления.
Несмотря на то, что воздушные ситуации вроде бы не так разнообразны и многочисленны, первая, основанная на натурных испытаниях стратегия обучения системы управления БПЛА настолько же неэффективна, как в случае с автомобилем, причем появляются дополнительные риски в виде возможной потери изделия. Поэтому применение технологий цифрового двойника для БПЛА, возможно, даже более актуально, чем для автомобиля.
Цифровой двойник местности может быть представлен как картой зоны полетов, так и, например, моделью города. Причем в случае с БПЛА, движущегося между домами в условиях плотной застройки, плоской карты города будет недостаточно – нужно объемное представление о модели зданий, сооружений, мест старта и посадки, зарядных станций. Виртуально можно оптимизировать необходимый набор дорогостоящих сенсоров (лидары, камеры, радары, ультразвуковые датчики), достаточный для распознавания окружающих объектов и позиционирования БПЛА в полете, например, в городских условиях.
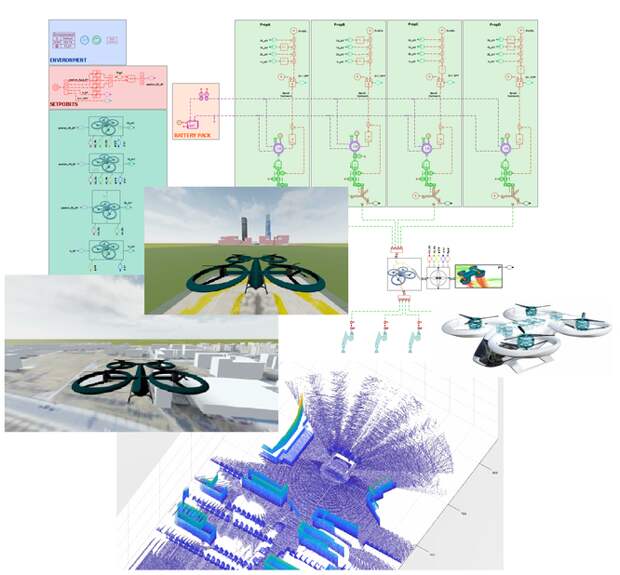
Цифровой двойник БПЛА может быть полностью виртуальным или полунатурным. В последнем случае к компьютеру с виртуальной моделью БПЛА физически подключаются органы управления: джойстики, педали, ручки, переключатели. Посредством такого пульта оператор управляет виртуальным БПЛА. Выполнение полетного задания демонстрируется на мониторе с отображением работы системы машинного зрения, а также графиков работы всех систем и агрегатов объекта управления.
Таким образом, если говорить об эффективных технологиях разработки беспилотной техники, то это технологии, базирующиеся на цифровом двойнике.
-
Дети и роботы: почему робототехникой стоит заниматься с малых лет


Сегодня робототехнике учат детей с 5-6 лет. На старте изучения дисциплины дети собирают роботов на базе специализированного конструктора. На занятиях по робототехнике ученики получают знания в прикладных дисциплинах, таких как 3D-моделирование, электротехника, пневматика, программирование и непосредственно конструирование. Такие занятия не только способны заинтересовать ребенка, но и сформировать базис навыков для дальнейшего развития в ИТ или инжиниринге. Среди специалистов на рынке особенно ценится математический склад ума и аналитическое мышление. Развитие ребенка в этом направлении может дать ему конкурентные преимущества при приеме на работу в отрасли будущего.

Кроме того, в процессе обучения ребенок сможет отработать навыки ведения проектной деятельности — в одиночку или в команде. Например, распределение ролей и обязанностей, продвижение и публичная защита проекта.
В современных школах стараются не загружать детей одной теорией. Очевидно, что ребенку гораздо интереснее учиться, занимаясь конструированием роботов с практической отработкой полученных теоретических знаний. На теорию отводится до трети всего образовательного курса. Основная часть — практические занятия под присмотром и руководством опытных наставников, обладающих техническими знаниями и специальной подготовкой для работы с детьми. Обучение ведется по модульной системе. Таким образом, внимание детей фокусируется на определенных задачах: электротехника и подготовка «сердца» робота или программирование его действий.

Возраст робототехнике не помеха
Если вам кажется, что ваш ребенок с детства увлекается техникой, если ему интересно устройство различных механизмов, то отдать его на пробные занятия можно даже в возрасте младших классов. Курс робототехники для таких ребят будет включать большие объемы практической работы с конструкторами, поэтому им не придется скучать на занятиях. Если вы все же хотите дать ребенку техническую базу, то возраст 10-11 лет будет наиболее подходящим для знакомства с физикой и более сложной математикой. В таком случае обучение прикладным дисциплинам, необходимым для конструирования роботов, будет тесно связано со школьной программой.
На базе Школы Точных Наук мы выделили основные маркеры, которые предрасполагают ребенка к изучению робототехники:
- Технический склад ума
- Любознательность к окружающим механизмам
- Увлеченность базовой математикой и информатикой
- Приветствуется развитие мелкой моторики рук, так как сборка роботов требует определенной сноровки
В школе Штерн на курсах робототехники занимаются дети с 6-7 лет. Занятия направлены на конструирование роботов на основе всем известного Lego. На его базе дети могут в формате игры получить начальные знания в области физики и программирования. Во время прохождения подобных курсов развиваются такие навыки, как логика, креативное мышление, умение нестандартно решать задачи, а также способности проектирования различных механизмов.
Дорога в светлое будущее
На данный момент во многих Российских университетах есть учебные программы, связанные с робототехникой. Например, в МГТУ им. Баумана, НИЯУ МИФИ и в Новосибирском государственном университете. Направление развивается в течение последних лет, поэтому не стоит сомневаться, что подобные программы в будущем откроются и в других университетах нашей страны. Кроме того, во многих зарубежных ВУЗах также есть схожие образовательные программы, поэтому в случае заинтересованности школьник может продолжить заниматься робототехникой на профессиональном уровне.

Разумеется, школы робототехники полезны не только будущим конструкторам андроидов. Вырабатываемые во время обучения навыки могут пригодиться во множестве специальностей: кому-то может понравиться программирование, кто-то найдет себя в графическом дизайне и моделировании, а кому-то будет интереснее заниматься созданием бумажных моделей.
Отрасль робототехники испытывает кадровый голод. В открытых на сегодня вакансиях, где требуются в том числе молодые специалисты без опыта работы, «вилка» заработной платы начинается от 100-110 тысяч рублей, в то время как специалисты «с бэкграундом» могут рассчитывать на значительно более высокую зарплату. Нет никаких сомнений в том, что диплом о прохождении курсов робототехники в юности будет замечательным дополнением к резюме специалиста.
Свежие комментарии